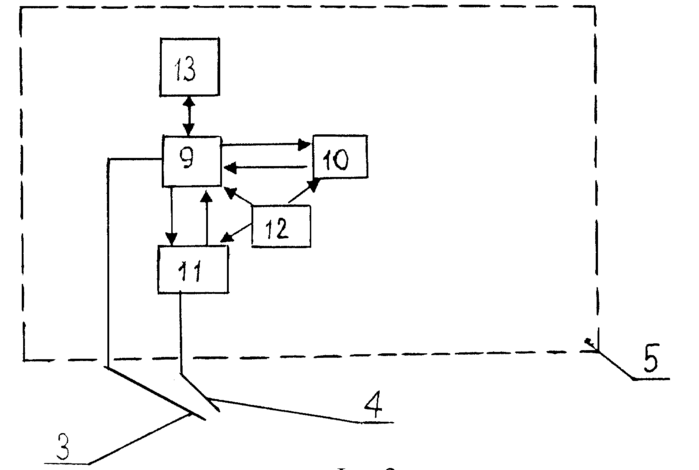
Промышленный робот содержит манипулятор 1 с шестью степенями подвижности, каждая из которых обеспечена посредством оси, снабженной механическим приводом (не показано) и электродвигателем 2, установленное на манипуляторе электрооборудование, включающее кабель управления 3 и кабель моторов 4, систему управления 5 и блок обработки данных 6. Электродвигатели 2 выполнены синхронными переменного тока со встроенными резольверами, используемыми в качестве датчиков положения и скорости, установлены на осях степеней подвижности манипулятора 1 с помощью переходных устройств 7 и снабжены переходными валами 8 для сочленения с валами механических приводов. Блок обработки данных 6 установлен на основании манипулятора 1 и соединен с резольверами электродвигателей 2 и с системой управления 5 (см. фиг.2), которая включает в себя блок управления 9, пульт программирования 10, привод 11, выполненный цифровым, блок питания 12 и дополнительно введенный в нее блок памяти 13, подключенный к блоку управления 9, имеющему свою память, и выполненный с возможностью введения и изменения в нем динамических и кинематических параметров манипулятора 1 робота в зависимости от его типа. Каждое переходное устройство 7 может быть выполнено, например, в виде фланца (см. фиг.4) со сквозным центральным отверстием 14, в котором устанавливается с возможностью вращения переходный вал 8.